热门






人形机器人“天工”是如何学会奔跑的?带你到训练场一探究竟

什么是人形机器人?工业和信息化部发布的《人形机器人创新发展指导意见》中,将人形机器人定义为“集成人工智能、高端制造、新材料等先进技术,有望成为继计算机、智能手机、新能源汽车后的颠覆性产品,将深刻改变人类生产生活方式”。
“天工”是全球首个纯电驱拟人奔跑全尺寸人形机器人,它可以稳定行走、奔跑、翻越障碍……“天工”是如何惟妙惟肖模地仿人体形态的?现代科技又是如何让机器人具备理解和认知能力的呢?

人形机器人如何模仿人类奔跑姿态?
一起跟随记者到人形机器人中心,看看研发人员是如何让人形机器人“巧夺天工”的。
总台央视记者 张春玲:我国自主研发的全球首个全尺寸纯电驱奔跑人形机器人,名字叫“天工”。它的奔跑速度是每小时6公里,可以在平地奔跑,也可以适应坡度,进行奔跑。
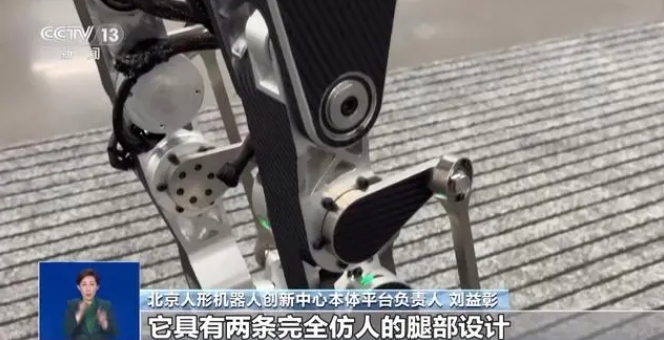
北京人形机器人创新中心本体平台负责人 刘益彰:这一款基础版本,是专门为运动控制算法而研发的一个最小系统,拥有完全仿人的腿部设计,腰部也有关节,具有旋转功能,双臂也有轻巧设计。
如何训练机器人惟妙惟肖模仿人体形态?
天工机器人实现了全球首例纯电驱全尺寸人形机器人的拟人奔跑。那么如何训练它去惟妙惟肖地模仿呢?一起了解机器人背后独特的算法↓↓
天工机器人的训练场景,和我们想象的真实训练场景不同,天工的训练基本都是在虚拟的世界完成的。在这个虚拟世界中,数千个机器人可以同时测试、训练,完成对自己行为的矫正。

北京人形机器人创新中心运动控制负责人 郭宜劼:我们在这虚拟的物理仿真引擎中,构建了一个非常大的训练场景。在这个仿真环境中训练10个小时,可能相当于在物理世界当中,一个机器人24小时昼夜不停地进行100天训练。
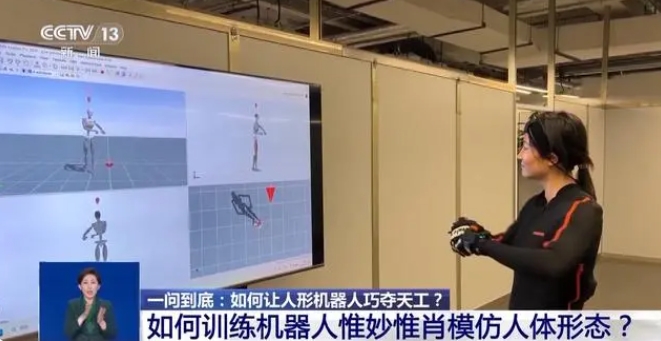
为了让机器人的奔跑步态更加拟人化,研究团队通过可穿戴设备,用Xsens动作捕捉的方式进行训练,让机器人在动作处理上,更加灵活多变,姿态也更加生动自然。

北京人形机器人创新中心运动控制负责人 郭宜劼:我们把人体的运动数据采集下来,在训练过程中,这些信息会经过网络形式和机器人当前的运动数据进行一些对比。这个网络能够判断当前机器人运动关系和我们采集的人类数据的关系的相似性,这个相似性的评分也会反馈给机器人策略更新。
如何让机器人具备理解和认知能力?
在智能决策和控制方面,天工机器人引入了人工智能大模型技术,让它具备了理解和认知的能力。
研发人员将识别系统和大模型算法集成在了一个机器臂上,让机器臂具备了感知和判断执行的能力。可以随机识别抓取桌子上的任意物品。
总台央视记者 张春玲:这个模型在识别一些没有见过的物体和一些异形甚至是不规则物体的时候,抓取能力还是非常精准的。

同时,为了满足特定场景需求,减少大模型对算力的依赖,研发团队正在建立人形机器人的数据集。通过量化或者压缩的算法,让机器人依赖相对少量的数据集就可以具备较好的理解能力。同时,也可以让机器人在断网的情况下进行工作。
北京人形机器人创新中心 具身智能负责人 鞠笑竹:未来会在家庭服务,包括物流、3C制造、家电制造,还有一些巡检的场景里,其实都去大量使用整个具身智能+的人形机器人。
“天工”正在进行持续迭代和开发
我们看到的“天工”,不仅是一个人形机器人,还是人形机器人的母平台。
研发人员介绍,机器人母平台可以作为一个基础平台,扩展出更多的功能。比如更换安装更为精巧的机器臂、更为智能的头部等。在机器人的胸腔内,还留存了足够的空间,方便它扩展电池续航和运算能力。
目前,人形机器人母平台“天工”正在进行持续的迭代和开发,作为一个母平台,未来会开放给机器人整个产业生态,带动整个产业链,降低制造门槛,同时避免重复开发浪费的时间和成本。
电话:010-50951355 传真:010-50951352 邮箱:sales@souvr.com ;点击查看区域负责人电话
手机:13811546370 / 13720091697 / 13720096040 / 13811548270 /
13811981522 / 18600440988 /13810279720 /13581546145

